

asmBots SDI
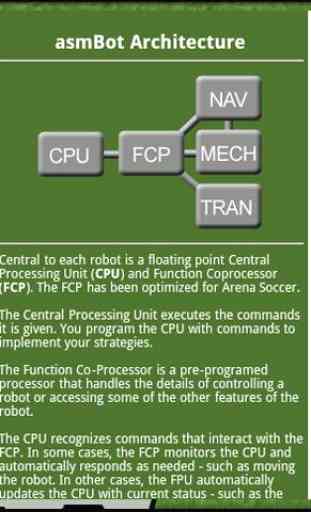
Amusez-vous tout en apprenant à programmer!Les citoyens de la galaxie! La fin de la guerre et de la pauvreté est sur nous. Les Dévoreurs Prodigal sont éteintes et les bénédictions partagées de la galaxie sont une fois de plus, la nôtre.Avec la fin de la Grande Guerre abstrait, l'Union d'empathie et de Quintessence désigné une énorme quantité de robots militaires que excédent. L'Union a autorisé la démilitarisation et la réutilisation de nombreux robots et autres équipements en surplus.La Coalition pour la Connaissance élargi (une fiducie publique officiel reconnu par l'Union), a construit un robot Proving Ground pour tous les citoyens magnanimes de la Galaxie.Chaque scène sur le «Proving Grounds» a un champ et un ordinateur central. Le mainframe contrôle le jeu. Le mainframe transmet une vue de l'action à votre dispositif d'accès.Alors que dans un jeu, toucher votre dispositif d'accès, pour afficher le panneau de commande central. Vous pouvez régler la vitesse de jeu, mettre en pause ou jouer le jeu (étape ou courir), sélectionnez le robot en cours d'élaboration, et d'élever le code de un robot.En vue du code, la ligne de code en cours est mis en évidence. En cliquant sur le bouton STEP, va provoquer le robot pour exécuter le code en surbrillance. Le mainframe mettra à jour la vue du jeu.Long-cliquant sur une ligne de code ouvre les options de code. Pour modifier la ligne de code, sélectionnez Modifier dans les options de code.Lors de l'édition du code, vous ne avez pas besoin de taper les commandes ou les registres parce que l'interface fournit des listes déroulantes pour les commandes et les registres.Au centre de chaque robot est une virgule flottante Unité centrale de traitement (CPU) et un coprocesseur de fonction (FCP).La CPU se compose d'un ensemble de registres qui contiennent des nombres. La CPU détecte un ensemble de commandes qui opèrent sur les registres (ou les chiffres qu'ils contiennent).Le FCP surveille certains registres et répond automatiquement en fonction de la valeur dans le registre. La FPU met automatiquement à jour certains registres ainsi.Un exemple d'un registre étant lu par le FCP est le registre directionnelle. Le FCP se lit en permanence le registre de direction et charge les divers sous-processeurs qui causent les servos et l'hydraulique du robot à courir dans la direction indiquée.Un exemple de la mise à jour des registres FCP est la position du robot. Le FCP met à jour les registres de position avec la position actuelle du robot obtenu à partir du sous-processeur de navigation.Votre bot est toujours en mouvement et la direction et la vitesse est déterminée par les valeurs dans les registres DIR et SPD. Le FCP accède à ces registres et contrôle des sous-systèmes du bot.Le FCP reconnaît deux modes de fonctionnement. Vous pouvez contrôler le mode en réglant le registre NMOD.Mode 0
- FCP définit le registre DIR provoquant le déplacement vers le point contenu dans TRGX, TRGY.Mode 1
- Votre programme doit définir le registre DIR.Vous pouvez arrêter en réglant le registre de SPD à 0.Code de codageCode est une série d'instructions dans l'ordre séquentiel.Commandes occupent une ligne de code et sont généralement suivis d'un ou plusieurs paramètres.KICK GOLR 10Les paramètres peuvent être soit un nombre littéral (tel que 10), un registre (une telle GOLR), ou une étiquette (par exemple: KICK_BALL_AT_GOAL).Outre les commandes, le code peut également contenir des étiquettes. Étiquettes en code marquent un point qui peut être sauté à partir d'un autre emplacement.RSET NMOD 0: DÉPARTRSET TRGX BALXRSET TRGY BALYJMPA: DÉPARTLe code ci-dessus représente un programme complet (mais simples) qui va provoquer le robot pour chasser la balle.La première ligne, RSET NMOD 0, dit le FCP que nous allons mettre notre position de cible et le FCP sera automatiquement définir le registre DIR.Les deuxième et troisième lignes définissent notre position cible à la position de la balle. La dernière ligne, JMPA: DÉBUT, saute à l'étiquette: DÉBUT, et de là, le TRGX et registres de TRGY sont mis à nouveau à la position des boules, puis la commande JMPA envoie le programme de retour pour commencer, et il recommence. Ce est une boucle infinie, mais parce que le FCP est en permanence mise à jour de la position de la balle, et BALX BALY, l'effet est le robot chasse la balle.
- FCP définit le registre DIR provoquant le déplacement vers le point contenu dans TRGX, TRGY.Mode 1
- Votre programme doit définir le registre DIR.Vous pouvez arrêter en réglant le registre de SPD à 0.Code de codageCode est une série d'instructions dans l'ordre séquentiel.Commandes occupent une ligne de code et sont généralement suivis d'un ou plusieurs paramètres.KICK GOLR 10Les paramètres peuvent être soit un nombre littéral (tel que 10), un registre (une telle GOLR), ou une étiquette (par exemple: KICK_BALL_AT_GOAL).Outre les commandes, le code peut également contenir des étiquettes. Étiquettes en code marquent un point qui peut être sauté à partir d'un autre emplacement.RSET NMOD 0: DÉPARTRSET TRGX BALXRSET TRGY BALYJMPA: DÉPARTLe code ci-dessus représente un programme complet (mais simples) qui va provoquer le robot pour chasser la balle.La première ligne, RSET NMOD 0, dit le FCP que nous allons mettre notre position de cible et le FCP sera automatiquement définir le registre DIR.Les deuxième et troisième lignes définissent notre position cible à la position de la balle. La dernière ligne, JMPA: DÉBUT, saute à l'étiquette: DÉBUT, et de là, le TRGX et registres de TRGY sont mis à nouveau à la position des boules, puis la commande JMPA envoie le programme de retour pour commencer, et il recommence. Ce est une boucle infinie, mais parce que le FCP est en permanence mise à jour de la position de la balle, et BALX BALY, l'effet est le robot chasse la balle.
Catégorie : Simulation
Recherches associées