

RoboCam
En utilisant RoboCam, vous pouvez contrôler votre propre robot LEGO Mindstorms EV3, Android ou Raspberry Pi par FPV.
Guide de démarrage rapide (uniquement pour ceux qui possèdent un kit pédagogique LEGO Mindstorms EV3 (45544)):
1. Assemblez le chercheur EV3 (instruction: https://goo.gl/yPU4sa), activez-le et assurez-vous que Bluetooth fonctionne.
2. Installez l'application RoboCam sur un smartphone (ci-après Téléphone 1).
3. Activez Bluetooth du téléphone 1 et assurez-vous que les téléphones 1 et EV3 sont connectés via Bluetooth (ils doivent être appariés).
4. Connectez le téléphone 1 et le smartphone que vous utiliserez pour contrôler le robot (ci-après Téléphone 2) au même routeur Wi-Fi.
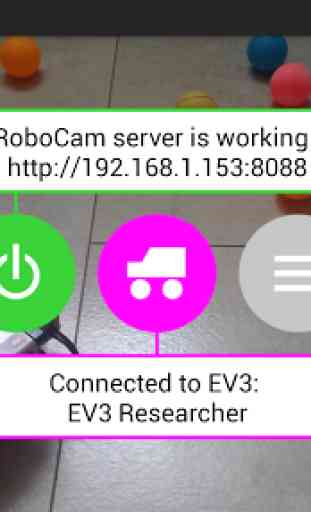
5. Démarrez un serveur RoboCam. Pour cela, appuyez sur le bouton vert de gauche.
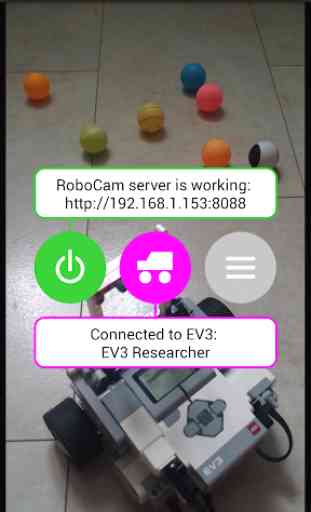
6. Connectez le téléphone 1 au robot. Pour cela, appuyez sur le bouton magenta au milieu.
7. Ouvrez Google Chrome sur le téléphone 2 et accédez au lien indiqué dans l'application RoboCam du téléphone 1.
8. Connectez-vous au téléphone 2 (utilisez par défaut admin et 123).
9. Sur le téléphone 2, apparaissent deux manettes de jeu et une vidéo de la caméra du téléphone 1. Verrouillez le téléphone et attachez-le au robot.
10. Vous pouvez maintenant contrôler votre robot via le téléphone 2.
Si vous avez un kit maison de LEGO Mindstorms EV3 (31313) ou si vous souhaitez contrôler un autre robot EV3 au lieu de Researcher EV3, vous devez configurer l'application RoboCam. Voir Paramètres RoboCam.
Pour utiliser l'application, vous devez connaître deux choses: comment configurer la connexion et comment se déroule le contrôle.
C’est le manuel rapide sur la configuration de la connexion standard. Besoin: robot EV3, smartphone Android avec la RoboCam installée (ci-après, le téléphone 1) et le smartphone ou la tablette (Android, iOS ou Windows) avec un navigateur moderne compatible avec HTML5 (ci-après, le téléphone 2). Le téléphone 1 est connecté à l'EV3 via Bluetooth (les appareils doivent être préalablement couplés!). Après avoir démarré le serveur RoboCam sur le téléphone 1 et connecté les téléphones 1 et 2 au même routeur WiFi, vous pouvez vous connecter au serveur RoboCam (sur le téléphone 1) via un navigateur (à partir du téléphone 2). Pour ce faire, vous devez écrire l'adresse dans le champ d'adresse du navigateur qui sera affiché dans RoboCam, par exemple, http://192.168.1.2:8088.
C'est la brève description de la façon dont le contrôle se produit. Après vous être connecté au serveur RoboCam via un navigateur de Phone 2 et avoir accédé à l'application Web RoboCam, vous verrez tout ce que la caméra du Phone 1 voit. Attachez le téléphone 1 à votre robot pour que sa caméra soit dirigée vers l’avant. L'application Web sur le téléphone 2 peut avoir de 1 à 4 manettes de jeu pour contrôler le robot en fonction des paramètres. Lorsque vous touchez le joystick, les coordonnées des points de contact sont transférées à l'application RoboCam sur le téléphone 1, puis, en fonction des paramètres du joystick, elles sont transformées en commandes de moteur EV3 ou envoyées aux boîtes aux lettres EV3. Si les coordonnées sont envoyées à des boîtes aux lettres, vous devez écrire un programme EV3 supplémentaire pour les traiter. Les noms des boîtes aux lettres sont les suivants: x et y - manette de jeu 1, w et z - manette de jeu 2, a et b - manette de jeu 3, c et d - manette de jeu 4.
Par défaut, l'application ne contient qu'un seul paramètre du robot - "EV3 Researcher", que vous pouvez voir sur la vidéo. Vous pouvez assembler EV3 Researcher à partir d'un kit pédagogique de LEGO Mindstorms EV3 (45544). Lien de téléchargement circuits de recherche de chercheurs : https://goo.gl/yPU4sa
Guide de démarrage rapide (uniquement pour ceux qui possèdent un kit pédagogique LEGO Mindstorms EV3 (45544)):
1. Assemblez le chercheur EV3 (instruction: https://goo.gl/yPU4sa), activez-le et assurez-vous que Bluetooth fonctionne.
2. Installez l'application RoboCam sur un smartphone (ci-après Téléphone 1).
3. Activez Bluetooth du téléphone 1 et assurez-vous que les téléphones 1 et EV3 sont connectés via Bluetooth (ils doivent être appariés).
4. Connectez le téléphone 1 et le smartphone que vous utiliserez pour contrôler le robot (ci-après Téléphone 2) au même routeur Wi-Fi.
5. Démarrez un serveur RoboCam. Pour cela, appuyez sur le bouton vert de gauche.
6. Connectez le téléphone 1 au robot. Pour cela, appuyez sur le bouton magenta au milieu.
7. Ouvrez Google Chrome sur le téléphone 2 et accédez au lien indiqué dans l'application RoboCam du téléphone 1.
8. Connectez-vous au téléphone 2 (utilisez par défaut admin et 123).
9. Sur le téléphone 2, apparaissent deux manettes de jeu et une vidéo de la caméra du téléphone 1. Verrouillez le téléphone et attachez-le au robot.
10. Vous pouvez maintenant contrôler votre robot via le téléphone 2.
Si vous avez un kit maison de LEGO Mindstorms EV3 (31313) ou si vous souhaitez contrôler un autre robot EV3 au lieu de Researcher EV3, vous devez configurer l'application RoboCam. Voir Paramètres RoboCam.
Pour utiliser l'application, vous devez connaître deux choses: comment configurer la connexion et comment se déroule le contrôle.
C’est le manuel rapide sur la configuration de la connexion standard. Besoin: robot EV3, smartphone Android avec la RoboCam installée (ci-après, le téléphone 1) et le smartphone ou la tablette (Android, iOS ou Windows) avec un navigateur moderne compatible avec HTML5 (ci-après, le téléphone 2). Le téléphone 1 est connecté à l'EV3 via Bluetooth (les appareils doivent être préalablement couplés!). Après avoir démarré le serveur RoboCam sur le téléphone 1 et connecté les téléphones 1 et 2 au même routeur WiFi, vous pouvez vous connecter au serveur RoboCam (sur le téléphone 1) via un navigateur (à partir du téléphone 2). Pour ce faire, vous devez écrire l'adresse dans le champ d'adresse du navigateur qui sera affiché dans RoboCam, par exemple, http://192.168.1.2:8088.
C'est la brève description de la façon dont le contrôle se produit. Après vous être connecté au serveur RoboCam via un navigateur de Phone 2 et avoir accédé à l'application Web RoboCam, vous verrez tout ce que la caméra du Phone 1 voit. Attachez le téléphone 1 à votre robot pour que sa caméra soit dirigée vers l’avant. L'application Web sur le téléphone 2 peut avoir de 1 à 4 manettes de jeu pour contrôler le robot en fonction des paramètres. Lorsque vous touchez le joystick, les coordonnées des points de contact sont transférées à l'application RoboCam sur le téléphone 1, puis, en fonction des paramètres du joystick, elles sont transformées en commandes de moteur EV3 ou envoyées aux boîtes aux lettres EV3. Si les coordonnées sont envoyées à des boîtes aux lettres, vous devez écrire un programme EV3 supplémentaire pour les traiter. Les noms des boîtes aux lettres sont les suivants: x et y - manette de jeu 1, w et z - manette de jeu 2, a et b - manette de jeu 3, c et d - manette de jeu 4.
Par défaut, l'application ne contient qu'un seul paramètre du robot - "EV3 Researcher", que vous pouvez voir sur la vidéo. Vous pouvez assembler EV3 Researcher à partir d'un kit pédagogique de LEGO Mindstorms EV3 (45544). Lien de téléchargement circuits de recherche de chercheurs : https://goo.gl/yPU4sa
Catégorie : Éducation
Recherches associées